.jpg) Киберспорт: самые популярные дисциплины
Киберспорт: самые популярные дисциплины  Какое счастье, что они родились в России... Без них она была бы совсем другая...
Какое счастье, что они родились в России... Без них она была бы совсем другая...  Много денег за услуги норовят содрать хапуги. Чем обоснован анапский оверпрайс?
Много денег за услуги норовят содрать хапуги. Чем обоснован анапский оверпрайс?  Шекспир У. Неизвестные переводы из архива издательства «Academia» (2024)
Шекспир У. Неизвестные переводы из архива издательства «Academia» (2024)  "Одсун" Алексей Варламов
"Одсун" Алексей Варламов  витамины - в жизнь! (желательно в творческую)
витамины - в жизнь! (желательно в творческую)  Почему?
Почему?  очарование сезона
очарование сезона  Подковерные интриги вокруг полигона ТБО в Моргаушском МО
Подковерные интриги вокруг полигона ТБО в Моргаушском МО
16.06.2020 —
любой заголовок, так пойдет?
Безинерционное торможение
 ru_auto — 17.06.2020
ru_auto — 17.06.2020
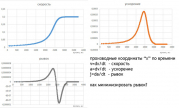
Каретка управляется шаговым двигателем и несет оборудование. Нужно чтобы при старте и остановке оборудование не качнулось. В кинематике это определяется «рывком» — производной по времени от ускорения. Но это не точно!
Первый алгоритм набора скорости был таким. Текущий алгоритм набора скорости на КДПВ. Стало лучше, но этого мало, нужно набирать скорость и тормозить быстее и мягче одновременно.

Расскажите как вы разгоняетесь и тормозите, чтобы пассажиры не пролили условное мороженое. Или решите в общем виде задачу минимизации третьей производной при наборе скорости от нуля до заданной.
Сохранено
|
|
</> |
Безинерционное торможение
Оставить комментарий
Популярные посты:
Предыдущие записи блогера :
16.06.2020 —
Новости теслостроения
15.06.2020 —
от полугода до года
15.06.2020 —
Всетаки машина и водитель это единое целое.
13.06.2020 —
Что-то пошло не так...
13.06.2020 —
Сегодня меня пытались убить...
11.06.2020 —
Вопрос любителям/владельцам CUV от VW
11.06.2020 —
верните заголовок
10.06.2020 —
Ололо... пыщ пыщ
Архив записей в блогах:
Власти Чечни обратятся к президенту в связи с дракой в детском лагере «Дон» и другими нападками на чеченцев в России.В письме будут прямые претензии к губернатору Краснодарского края Александру Ткачеву. Если не дать «политическую ...
Украинская погранслужба задержала судно под российским флагом с экипажем из 10 граждан РФ. Капитана судна задержали и доставили в херсонское отделение СБУ, его обвиняют в нарушении порядка въезда "на оккупированную территорию". Капитану грозят лишением свободы на срок до пяти лет, а ...
Он умеет выразить страсть одним точным жестом, одной позой сказать больше, чем другие говорят обилием движений и взмахами рук Боль — состояние, в котором Евгений Плющенко привык жить. И не просто жить, а кататься на глазах у переполненных залов, прыгать четверные прыжки, делать свои ...
Оглавление . 5 Прочие же из умерших не ожили, доколе не окончится тысяча лет. Это — первое воскресение. пр0чіи же мертвецы2 не њжи1ша, д0ндеже скончaетсz тhсzща лётъ. СE воскrніе пeрвое. (Откр.20:5) прочии же мертвецы не ожиша, дондеже скончается тысяща лет. Се воскресение ...
Друзья мои! Священный Олень принёс, наконец, нам Солнце! Приветствуем его открытым сердцем и благодарной душой! И выбираем для себя Радость сегодня и каждый день нового года! Всем желаю уютного семейного тепла, надежного плеча и близости тех, с кем можно будет разделить эту радость и это ...




{kind=link}