 Нарколог на дом в Краснодаре: что важно знать о специалистах в лечении зависимости
Нарколог на дом в Краснодаре: что важно знать о специалистах в лечении зависимости  Фото дня, Людмила Семеняка
Фото дня, Людмила Семеняка  Бумеры, милениалы, зумеры и все-все-все
Бумеры, милениалы, зумеры и все-все-все  козёл фрэнк
козёл фрэнк  Нейровоссоединение
Нейровоссоединение  "Для начала Трамп объявил два режима ЧС" или Последний акт "Американской
"Для начала Трамп объявил два режима ЧС" или Последний акт "Американской  МАШИНА во ВРЕМЕНИ
МАШИНА во ВРЕМЕНИ  Илон Маск провёл испытания салюта к инаугурации Трампа
Илон Маск провёл испытания салюта к инаугурации Трампа  Угре***ь с кайфом на Вуоксе
Угре***ь с кайфом на Вуоксе
21.01.2018 —
О строительстве...
За что я люблю Maxim Integrated
 engineering_ru — 03.02.2018
Схема потребляет микроамперы в режиме радиомолчания
engineering_ru — 03.02.2018
Схема потребляет микроамперы в режиме радиомолчанияТок потребления при вращении двигателя без нагзуки 70мА, под нагрузкой до 300мА, при напряжении 3 вольта.
двигатель хороший, руками остановить не удается, 60RPM 6 вольт, 30мА бе нагрузки.

После ужастного опыта с Texas instruments LM2623AMM, и попытке повысить напряжение с 3 вольт до 12 вольт, отказался от этой затеи, и ограничился повышением всего до 5 вольт.
На 6 вольт намного меньше птредложение чипов.
А 3 вольта на 5 вольт это самое распространенное.
Двигатель заменил на 6 вольтовый, и произвел замеры его тока предварительно.
Большой плюс такого двигателя, что он залезает в любую штангу для рулонных штор, диаметр его всего 16мм.
1) Искал наиболее эффективный преобразователь на 200-300ма тока, под нагрузкой.
Остановился на MAX8815A. Эффективность 97% при токе 200..300ма, именно то, что нужно.
https://datasheets.maximintegrated.com/en/ds/MAX8815A.pdf
Ну и самое главное, работает от 1.8 вольт, и при этом имеет разумную эффективность.
т.е. можно добится рекордной утилизации батареи. Даже пары 2х1.5в = 3V
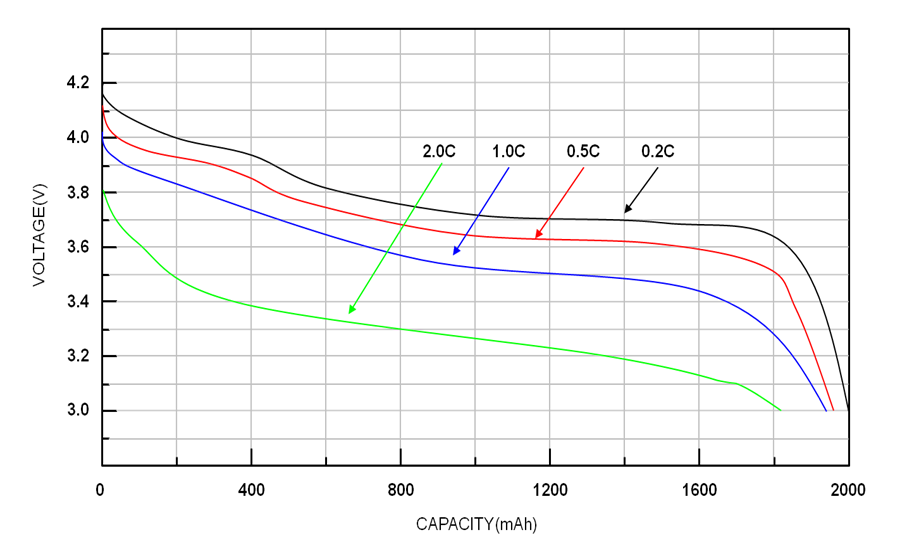
не говоря уже о литиевом аккумуляторе:
http://www.richtek.com/battery-management/img/battery-discharge.png
100% утилизация энергии.
Ну и самое главное MAX8815 стоил не очень дорого, всего полтора доллара где-то.
Да и еще важно, чтобы Boost converter имел мягкий старт (soft-start) иначе может уходить микроконтроллер в ресет при старте boost converter.
1.1) в прошлой поделке, я выбрал первый попавшийся индуктор не обратив внимание на важный параметр Rdc (паразитное сопротивление) в этот раз я учел этот промах, и поставил один из лучших индукторов по этому показателю.
не смотря на цену в 1.5 доллара и увечичение габаритов.
В даташите 45мОм (милли ом), а я поставил 20мОм.
Это позволяет почти полностью убрать потери в индукторе.
(Остаются потери на ключе, и диоде внутри преобразователя.)
2) Для удобства пользования оснастил занавески контроллером заряда литиевой батареи и разьемом USB.
TP4056 китайский чип, купил вместе с USB разьемом и платкой в сборе (стоил 2 доллара на али), разобрал на детали и поставил на свою плату:)))
https://dlnmh9ip6v2uc.cloudfront.net/datasheets/Prototyping/TP4056.pdf
тут появляется первая сложность: ведь при заряде литиевого аккумулятора напряжение доходит то 4.2 вольта, тогда как абсолютный максимум для BlueNRG-1 3.9 вольт.
Тут я начал искать LDO с минимальным падением, чтобы обеспчить надежную работу BLUENRG-1.
Нашел LDO у которого падение всего 0.15 Вольта при этом оно способно работать при низком напряжении питания, до 1.2 Вольта: RT9078/N-3.3
Поставил на 3.3 вольта.
Мне вообще нравятся LDO от Richtec, у них можно найти достаточно феноминальные параметры, у этого LDO quinescent current всего 2uA.
3) Драйвер пришлось заменить.
A4953 мог работать только с >8 Вольт если меньше то просто отключался.
Как назло снова пришлось изпользодать Texas: DRV8839DSSR
http://www.ti.com/lit/ds/symlink/drv8839.pdf
это новая разработка, и работает она с напряжением от 0 до 11 вольт.
и при этом может управляться от 1.8-V to 7-V
что тоже хорошо ложиться на то, что может выдать BlueNRG1 при почти полностью разряженой батареи.
MOSFET ON-Resistance: HS + LS = 280 mΩ
Тоже достаточно хороший показатель для таких чипов.
Темболее что габаритные размеры у него рекордно маленькие.
Ну вот, старый вариант:
https://vkorehovisback.livejournal.com/30445.html
с двигателем на 12 вольт.
а) шумел
б) потреблял при холостом ходе 300ма, (из них сам преобразователь 140ма, без нагрузки)
новый потребляет всего 70ма, без нагрузки. и практически бесшумный.
миниатюризация всего это движение в правильном напрявлении.
4) промахи мимо нужных пинов в BlueNRG1 тоже ликвидированы, теперь двигателем можно управлять с помощью PWM (только DIO2 и DIO3 могут выдавать PWM у BLUENRG1)
5) ну и пины ADC подключены так, чтобы мониторить наличие зарядки, и мониторить насколько разряжена батарея.
устройство должно выслать предупреждение что у нее заканчивается батарея, по BLuetooth.
6) В RF часть добавил mathcing network. И не ошибся, простое впаивание индуктора на 1.2nH позволило улучшить выходную мощьность на 4 децибелла.
В ближайшее время собираюсь приобрести сетевой анализатор, и изучить этот вопрос плотнее. Казалось бы чего там согласовывать? у антенны 50 ом, и у BALUN 50Ом, однако очевидно это не так, есть еще паразитные емкости/индуктивности и т.д.
В принципе при наличии достаточного времени можно настроить matching нетворк только по измерителю мощности.
Проект тут:
https://github.com/vkorehov/hw/tree/master/bluenrg1_v2
Схема тут:
https://github.com/vkorehov/hw/tree/master/bluenrg1_v2/bluenrg.pdf
Сохранено
|
|
</> |
За что я люблю Maxim Integrated
Оставить комментарий
Популярные посты:
Предыдущие записи блогера :
Архив записей в блогах:
"Российская газета", на минуточку. Официальный орган... На водку дал К. А. Зубков ...
Бытовых... проишествий Вечерело. А старушки всё падали и падали... (с) pic.twitter.com/e68w4vV2Tk — Электрик с антителами (@ElectricBanned) May 29, 2021 Что за адище — Как же я заебалась ?? (@BreadaNet) May 29, 2021 Санаторий сатаны. — Не,ну_это_уже (@strafengo) May ...
Любой уважающий себя город возраст, которого исчисляется веками, обязан иметь дом с привидениями. 1. Ленинская, 135 Дом-музей В.И. Ленина "предметы появляются не на тех местах, на которых их оставляли сотрудники музея. "Однажды на ...
Кристис ...
14:38:51 DSC_1676-2
Taken on November 19, 2018
Nikon D60 ,18.0-55.0 mm f/3.5-5.6
ƒ/6.3
55.0 mm
1/160
200
Bergamo, Lombardy, Город в Италии ...



{kind=link}